Digital Combat Simulator: Black Shark 2

O Kamov KA-50 "Black Shark" (Tubarão Negro) é um helicóptero de ataque russo único e mortal, que foi visto um combate no norte do Cáucaso. Ele combina um sistema de rotor duplo de alto desempenho com uma carga de armas mortais de mísseis guiados, foguetes, bombas e um canhão de 30 mm. O KA-50 também é único, pois possui um assento de ejeção.
Visão geral do DCS: Ka-50 Black Shark
DCS: Ka-50 Black Shark é um simulador de PC do helicóptero de ataque russo KA-50 é o primeiro título de uma nova série de simulações da Eagle Dynamics e The Fighter Collection: Digital Combat Simulator (DCS). Seguindo a tradição de excelência da Eagle Dynamics, DCS: KA-50 Black-Shark trará uma experiência de simulação ainda mais realista do que seu predecessor Lock On: Flaming Cliffs.
O DCS: Black Shark KA-50 oferecerá um nível de realismo sem precedentes no que diz respeito à dinâmica de voo, modelagem de instrumentos, sistemas aviônicos e sistemas de armas. A inteligência artificial de veículos terrestres e helicópteros foi melhorada drasticamente, assim como a simulação das armas. Um novo Editor de Missão inclui um poderoso sistema de mapeamento eletrônico que permite ao usuário criar facilmente missões e campanhas. Um novo sistema de campanha permite que a linha de frente do campo de batalha avance e recue de acordo com o sucesso ou fracasso de sua missão. Devido à maior flexibilidade do sistema DCS, aviões adicionais e acessórios para helicópteros o acompanharão em breve.
Simulação dos Sistemas do KA-50
O modelo de voo e sistemas do Ka-50 foi implementado usando as seguintes metodologias.
Simulação Dinâmica do Helicóptero
DCS: Ka-50 Black Shark é um simulador de PC do helicóptero de ataque russo KA-50 é o primeiro título de uma nova série de simulações da Eagle Dynamics e The Fighter Collection: Digital Combat Simulator (DCS). Seguindo a tradição de excelência da Eagle Dynamics, DCS: KA-50 Black-Shark trará uma experiência de simulação ainda mais realista do que seu predecessor Lock On: Flaming Cliffs.
O DCS: Black Shark KA-50 oferecerá um nível de realismo sem precedentes no que diz respeito à dinâmica de voo, modelagem de instrumentos, sistemas aviônicos e sistemas de armas. A inteligência artificial de veículos terrestres e helicópteros foi melhorada drasticamente, assim como a simulação das armas. Um novo Editor de Missão inclui um poderoso sistema de mapeamento eletrônico que permite ao usuário criar facilmente missões e campanhas. Um novo sistema de campanha permite que a linha de frente do campo de batalha avance e recue de acordo com o sucesso ou fracasso de sua missão. Devido à maior flexibilidade do sistema DCS, aviões adicionais e acessórios para helicópteros o acompanharão em breve.
Simulação dos Sistemas do KA-50
O modelo de voo e sistemas do Ka-50 foi implementado usando as seguintes metodologias.
Simulação Dinâmica do Helicóptero
- X,Y,Z – Eixos de referência;
- V – Vetor de velocidade;
- Fmg – Gravidade;
- Fuz – Força aerodinâmica da fuselagem;
- Frw – Força aerodinâmica da asa direita;
- Flw – Força aerodinâmica da asa esquerda;
- Frs – Força aerodinâmica do estabilizador direito;
- Fls – Força aerodinâmica do estabilizador esquerdo;
- Ff – Força aerodinâmica do estabilizador vertical;
- F1bl1 ... F6bl1 – Forças resultantes dos elementos da lâmina;
- T – Força de tração resultante dos rotores, T = ∑16∑16FiBLj
As propriedades aerodinâmicas do chassi do KA-50 são derivadas de seus parâmetros de subelemento: fuselagem, asas, cauda e trem de pouso. Cada um deles tem sua própria posição e orientação dentro do sistema de coordenadas locais da célula e cada um tem suas próprias características aerodinâmicas. Cada subelemento é calculado por diagramas independentes de coeficientes de sustentação e arrasto, grau de dano que influência as propriedades de sustentação e posição de centro de gravidade (CG) e características inerciais. As forças aerodinâmicas que atuam sobre cada sub-elemento da célula são calculadas separadamente em seu próprio sistema de coordenadas, levando-se em consideração a velocidade no ar local do sub-elemento.
Contatos com o terreno e objetos externos são simulados com base no sistema de pontos de contato rígidos.
Trem de Pouso
O trem de pouso é simulado como braços de engrenagem separados, cada um consistindo de uma roda e um amortecedor assimétrico. A roda do nariz é auto-orientada, baseada em forças externas atuantes. Tal modelo permite a simulação do comportamento realista, incluindo o desenvolvimento de efeitos de oscilação em altas velocidades. Recuar e baixar o trem de pouso pode levar ao reposicionamento do centro de gravidade (CG). Ao simular as operações do trem de pouso, suas propriedades cinemáticas, forças externas e hidráulicas são levadas em consideração. O resultado é um comportamento muito realista em todas as condições.
Modelo de Danos

O modelo de danos baseia-se em forças de contato aerodinâmicas e rígidas, quando aplicável. Danos a componentes da estrutura, trem de pouso, rodas, sensores e dispositivos são levados em consideração. Qualquer dano afetará as propriedades físicas e funcionais do helicóptero e reposicionará o "CG".
Modelo do Rotor
O modelo de rotor do KA-50 Black Shark é revolucionário entre os simuladores de helicópteros. Ele é baseado em um modelo de junção de cada pá com seu próprio movimento complexo em relação ao eixo do rotor e às dobradiças (horizontais) e de caça (vertical). Cada lâmina é separada em vários segmentos, cada um com seu próprio vetor de velocidade do ar com base em sua orientação, torção e velocidade induzida na seção atual do rotor. A velocidade induzida é calculada resolvendo as equações baseadas na aplicação simultânea do teorema da quantidade de movimento e do método do elemento da lâmina. Tudo isso produz uma dinâmica natural do helicóptero, como a inclinação do rotor cônico em voo frontal (oscilações na planagem com manche parado, entrada do manche aumentando de acordo com a velocidade do ar), excesso de potência após a transição de planagem para voo frontal, efeito solo (sobre a superfície inclinada ou perto de objetos no solo), fenômenos de “anel de vortex”, tenda do fluxo de ar das lâminas, interseção das lâminas (colisão). No caso de dano individual da lâmina, a dinâmica correspondente é naturalmente simulada como parte do modelo geral do rotor.
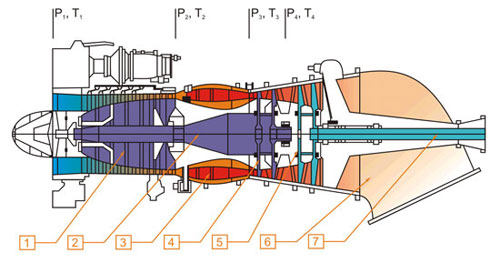
Turbina
- Ignição da turbina direita.
- Turbina direita TV3-117VMA.
- Caixa de marchas principal.
- Turbina esquerda TV3-117VMA.
- Ignição da turbina esquerda.
- Caixa de marchas intermediária.
- APU.
- APU Dreno da tubulação de ar.
- Gerador Direito.
- Acionador da turbina.
- Gerador Esquerdo.
- Acionador do eixo de entrada.
A turbina do Ka-50 consiste em uma caixa de engrenagens com embreagens de rotação livre, duas turbinas com eixo turbo TV3-117VMA com reguladores eletrônicos da turbina, uma unidade de potência auxiliar e turbo-engrenagem.
Pela primeira vez na história da simulação de voo, o modelo da turbina é baseado em um simulação física detalhada do eixo turbo como um sistema de componentes separados do sistema de dinâmica do gás da turbina: entrada da turbina, compressor, câmara de combustão, turbina de alta pressão e turbina de potência com exaustão.
A simulação corresponde ao turbina real em todos os modos de operação em termos de potência de saída, aceleração, RPM do compressor, temperatura do gás de exaustão (EGT) e consumo de combustível, em relação à pressão e temperatura do ar e ambiente. A operação das válvulas de drenagem aérea é simulada para o sistema antiestolagem do compressor, o sistema de degelo da turbina e o ciclone de poeira. Ao reduzir o fluxo de ar através da turbina, esses dispositivos aumentam o EGT e diminuem a potência de decolagem da turbina.
A degradação dos parâmetros dos componentes da turbina é implementada no simulador dentro da vida útil ou em caso de limitações de operação excedida dos modos de potência de descolagem e emergência ou perda de potência com excesso de limite do EGT.
A simulação corresponde ao turbina real em todos os modos de operação em termos de potência de saída, aceleração, RPM do compressor, temperatura do gás de exaustão (EGT) e consumo de combustível, em relação à pressão e temperatura do ar e ambiente. A operação das válvulas de drenagem aérea é simulada para o sistema antiestolagem do compressor, o sistema de degelo da turbina e o ciclone de poeira. Ao reduzir o fluxo de ar através da turbina, esses dispositivos aumentam o EGT e diminuem a potência de decolagem da turbina.
A degradação dos parâmetros dos componentes da turbina é implementada no simulador dentro da vida útil ou em caso de limitações de operação excedida dos modos de potência de descolagem e emergência ou perda de potência com excesso de limite do EGT.
- P,T – pressão e temperatura para perfis marcados.
- Compressor.
- Eixo do compressor.
- Combustor anular.
- Turbina do Compressor.
- Turbina de energia livre.
- Difusor.
- Eixo de potência.
O sistema de controle da turbina, como na vida real, consiste em um regulador de RPM turbo compressor (gás gerador GG), regulador RPM da turbina de força, dispositivos de ignição e aceleração automáticos da turbina, regulador eletrônico da turbina (EEG) que limita o máximo EGT e monitora/limita o RPM da turbina de potência.
Exceto para controle direto da turbina, o sistema de controle incorpora ciclo de partida do APU, motores principais e turbo engrenagem, turbina e equipamentos de teste de controles da turbina como falsa ignição, ventilação da turbina (manivela), teste do EEG, rotor, reajuste do regulador de RPM e muito mais.
O Sistema Hidráulico
O sistema hidráulico incorpora todos os servo amplificadores, acumuladores, tanques e bombas auxiliares. Como no sistema real, ele é subdividido em sistemas principal e comum, cada um com suas próprias linhas, bombas e consumidores. No modelo de servo amplificador, o deslocamento da haste de potência de saída como uma função da pressão do fluido (e posição da válvula seletora) é levado em consideração juntamente com fatores externos como momentos de articulação, reações de suporte etc. A pressão do sistema é determinada pela carga nos acumuladores em função do fornecimento de bombas e do consumo de cargas e também dos vazamentos de danos.
Sistema de Combustível
- Bomba. Uma para cada tanque.
- Interruptor de pressão. Um para cada tanque.
- Válvula de retenção.
- Válvula flutuante.
- Scupper assy. Para tanques dianteiros e traseiros.
- Transmissor da quantidade de combustível. Para tanques dianteiros e traseiros.
- Válvula de desligamento do motor.
- Válvula de alimentação cruzada.
- Motor direito da válvula de corte.
- Passagem secundária da válvula de retenção.
- Válvula de desligamento APU.
Sistema Elétrico
O sistema elétrico inclui:
- Sistema de distribuição principal da corrente alternada (AC)
- Sistema de distribuição da corrente alternada de emergência (AC)
- Sistema de distribuição de corrente contínua (DC)
- Fontes externas de energia elétrica para fornecimento de corrente direta alternada
O sistema de geração de energia elétrica do KA-50 fornece energia AC e DC para os barramentos primário e de emergência e conjuntos de distribuição. Esta fonte de alimentação é usada para acionar o sistema dos aviônicos, iluminação interna e externa, hidráulica, controle e monitoramento do sistema de combustível, turbinas e sistemas de força auxiliar da ignição. Quando em terra, um carga de energia externa pode ser usado como uma fonte de energia alternativa. Além da capacidade de geração de energia a bordo, o KA-50 também inclui baterias das quais a energia elétrica pode ser extraída.
O Sistema de Corrente Alternada
O sistema elétrico primário é alimentado por geradores de corrente alternada (AC) de 115/200V e 400 Hz. Esta fonte é dividida em sistemas esquerdo e direito em canais independentes para fornecer redundância no sistema. A operação do gerador depende da ativação das turbinas esquerda e direita, pois cada mecanismo contém uma caixa de engrenagens que executa o gerador. Os sistemas do canal esquerdo podem ser alimentados pelo gerador direito e os sistemas de canal direito são alimentados pelo gerador esquerdo. No caso de ambos os geradores se tornarem inoperantes, um inversor de DC para AC estático de back-up pode assumir a energia dos sistemas mais importantes e a corrente contínua acionará o sistema de alerta de voo.
O sistema de corrente contínua
Os sistemas que requerem energia de corrente contínua (DC) são fornecidos em 27V por meio do uso de retificadores de transformador de AC para DC. Os retificadores de transformadores estão ativos enquanto os geradores estão em operação. Se um dos retificadores do transformador estiver desligado, os sistemas serão comutados para o retificador do transformador de operação. Se ambos os transformadores-retificadores e/ou geradores estiverem off-line, os sistemas aviônicos mais importantes serão comutados para energia DC de emergência.
Danos ao sistema de geração elétrica também se manifestam no modelo de danos visual do KA-50. Uma abordagem orientada a eventos é implementada de tal forma que uma perda de energia elétrica nos sistemas terá um efeito cascata. Isso significa especificamente que a perda de um sistema elétrico terá repercussões afetando os elementos ligados do sistema elétrico.
O sistema elétrico primário é alimentado por geradores de corrente alternada (AC) de 115/200V e 400 Hz. Esta fonte é dividida em sistemas esquerdo e direito em canais independentes para fornecer redundância no sistema. A operação do gerador depende da ativação das turbinas esquerda e direita, pois cada mecanismo contém uma caixa de engrenagens que executa o gerador. Os sistemas do canal esquerdo podem ser alimentados pelo gerador direito e os sistemas de canal direito são alimentados pelo gerador esquerdo. No caso de ambos os geradores se tornarem inoperantes, um inversor de DC para AC estático de back-up pode assumir a energia dos sistemas mais importantes e a corrente contínua acionará o sistema de alerta de voo.
O sistema de corrente contínua
Os sistemas que requerem energia de corrente contínua (DC) são fornecidos em 27V por meio do uso de retificadores de transformador de AC para DC. Os retificadores de transformadores estão ativos enquanto os geradores estão em operação. Se um dos retificadores do transformador estiver desligado, os sistemas serão comutados para o retificador do transformador de operação. Se ambos os transformadores-retificadores e/ou geradores estiverem off-line, os sistemas aviônicos mais importantes serão comutados para energia DC de emergência.
Danos ao sistema de geração elétrica também se manifestam no modelo de danos visual do KA-50. Uma abordagem orientada a eventos é implementada de tal forma que uma perda de energia elétrica nos sistemas terá um efeito cascata. Isso significa especificamente que a perda de um sistema elétrico terá repercussões afetando os elementos ligados do sistema elétrico.
Visão Geral do Sistema de Aviônicos do KA-50
Embora um manual de voo altamente detalhado seja fornecido com o DCS: Black Shark, o seguinte fornece uma pequena amostragem dos sistemas aviônicos modelados em nossa simulação do KA-50. Sistemas de pilotagem, navegação, segmentação e defesa e incluídos nesta visão geral.
Embora um manual de voo altamente detalhado seja fornecido com o DCS: Black Shark, o seguinte fornece uma pequena amostragem dos sistemas aviônicos modelados em nossa simulação do KA-50. Sistemas de pilotagem, navegação, segmentação e defesa e incluídos nesta visão geral.
Instrumentos da Cabine

Os instrumentos da cabine do piloto KA-50 são geralmente medidores eletromecânicos tradicionais que são montados no painel dianteiro e nos painéis lateral/traseiro. Esses instrumentos são divididos em três grupos gerais: controle de voo, controle/monitoramento da turbina e controle dos sistemas. Outras interfaces da cabine incluem comutadores tradicionais, mostradores e comutadores de múltiplas posições. Além disso, o KA-50 possui vários bancos de luzes de advertência e controles de iluminação da cabine.
Sistema Avançado de Movimentação de Mapas AMMS (ABRIS)

O painel ABRIS é um tela multifuncional que permite ao piloto realizar as seguintes tarefas:
- Programação, edição e salvamento de pontos de rota, pistas, sinalizadores de rádio, locais de destino e a capacidade de estudar o terreno ao longo da rota de voo, etc.
- Capacidade de alterar o plano de voo durante a missão.
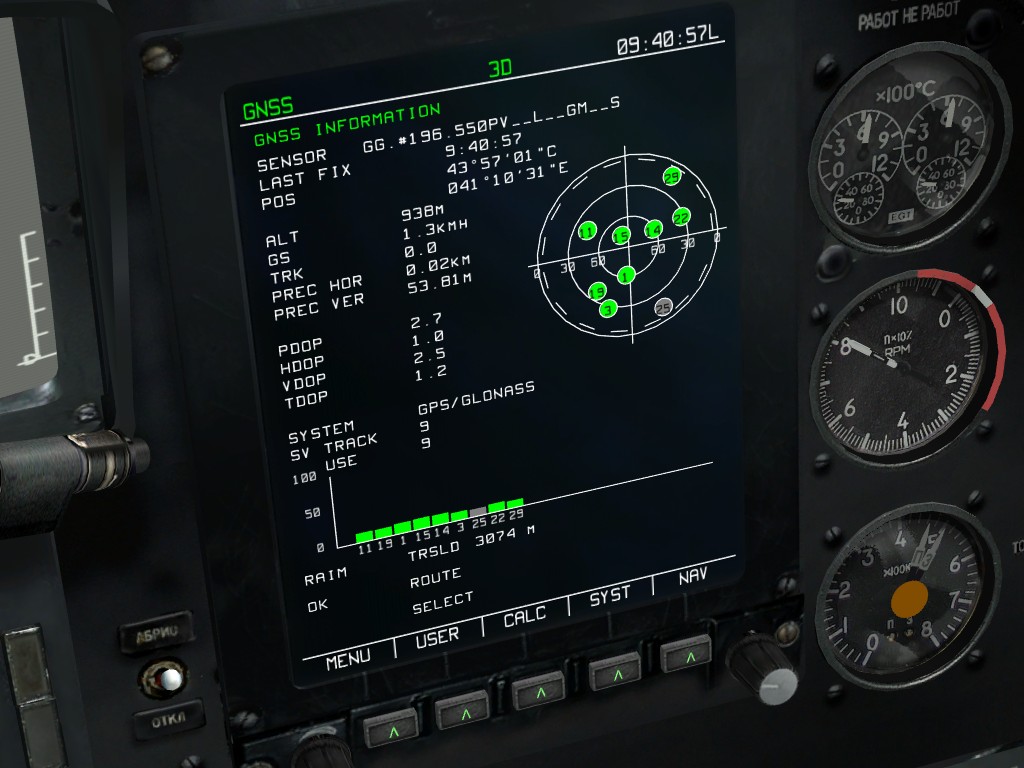
- Determinação em tempo real das coordenadas da posição do helicóptero utilizando o sensor do sistema de navegação por satélite incorporado (GPS/GLONASS); exibição da posição do helicóptero na exibição do mapa eletrônico em movimento; capacidade de percorrer escalas dos mapas; verificar o erro da trajetória cruzada e as outras informações de navegação necessárias.
- Exibição de informações aeronáuticas e plano de voo necessários para a navegação durante todas as etapas de uma missão;
- Recepção de informações dos sensores de altitude e pressão autônomas e processamento necessário da altitude e pressão para as necessidades do sensor embutido no sistema de navegação por satélite.
- Recepção e processamento de informações de outros sistemas aviônicos, como o sistema de navegação de direcionamento «Rubicon» e o equipamento de link de dados.
- Indicando a posição dos "anjos" usando o link de dados, bem como o vetor da linha de visão do sistema de alvos "Shkval".
- Anotação no mapa em movimento com texto e símbolos.
Sistema de Navegação Aquisição de Alvos «Rubicon»

O sistema de navegação e aquisição de alvos é projetado para integrar tarefas de combate, navegação e voo, processamento de informações digitais e analógicas. O «Rubicon» está integrado ao sistema de aquisição de alvos «Shkval», no sistema de visualização de informação aérea e no sistema de controle de armas.
Sistema de Navegação «Radian»
«Radian» é um subsistema do «Rubicon» que ajuda a automatizar a navegação de voos. «Radian» pode armazenar informações em sua memória, como coordenadas para dois aeródromos, seis pontos de rota num plano de voo, dez alvos operacionais e quatro pontos de referência.
Sistema I-251 «Shkval»


O sistema «Shkval» consiste de uma câmera de televisão combinada com um localizador de faixa a laser e um designador de iluminação a laser para guiar o sistema de mísseis anti-tanque.
O sistema «Shkval» pode ser estabilizador do solo e é capaz de rastrear automaticamente um alvo designado. Existem dois níveis de "Fields Of View" (FOV) (Campo de Visão):
Amplo "FOV" com uma ampliação de 6x e "FOV" estreito com uma ampliação de 22x. Os limites de suspensão do cardan "FOV" são: ±35° em azimute e +15° a -80° em elevação.
A imagem do vídeo é mostrada como uma imagem em escala cinza no monitor de TV IT-23VM.
O "Shkval" pode ser configurado para procurar alvos automaticamente e a taxa angular de varredura pode ser definida manualmente pelo piloto enquanto estiver na cabine.
Para virar a câmera «Shkval», o piloto usa um pequeno mini-manche no manche principal do helicóptero.
Sistema de Exibição de Informações «Ranet»
O sistema de exibição de informações «Ranet» foi projetado para processar e exibir informações de voo, navegação e segmentação no monitor na altura dos olhos "Head-Up Display " e no indicador de vídeo IT-23.

As informações de voo, navegação e segmentação são exibidas no HUD, que é recebido do sistema de exibição de informações «Ranet».

Os limites do campo de visão são de ±60° em azimute e de -20° a +45° em elevação.


O sistema de piloto automático é integrado aos sistemas de direcionamento e navegação e produz uma entrada de controle para o sistema de voo automático para desvio do helicóptero da atitude e altitude atribuídas.
O sistema de navegação inercial Ts-061 inclui uma giroscópio e três acelerômetros, projetados para a determinação da direção de voo e da atitude do helicóptero. O sistema também mede acelerações para calcular a velocidade inercial e a posição do helicóptero.
Sistema de Dados Aéreos
O sistema de dados aéreos é projetado para receber entradas de vários instrumentos, processar essas entradas e apresentá-las ao piloto.
O sistema de dados aéreos é projetado para receber entradas de vários instrumentos, processar essas entradas e apresentá-las ao piloto.
Sistema de Navegação Doppler
O sistema de navegação por doppler é usado para determinar a velocidade e o ângulo de desvio do helicóptero.
Equipamento de Link de Dados




Para a programação dos dispensadores de contra-medidas, é utilizado o painel de controle UV-26. Dependendo do tipo de ameaça, o piloto pode definir o programa de distribuição apropriado para gastar os papéis metálicos (Chaff) e/ou bastões de iluminação (Flares). O piloto pode determinar o número de flares para dispensar e a salva, o tempo entre cada flare e o tempo entre as salvas. Usando o painel de controle, é possível selecionar com o dispensador para usar (esquerda ou direita) e quando iniciar ou parar o programa de dispensação.
Rádio UHF R-800


As animações foram usadas às vezes para suplementar as equações da dinâmica de voo; isso, por sua vez, levaria a um comportamento de voo irrealista em certas situações, como altos ângulos de ataque e partidas. Esta ausência de simulação detalhada do ângulo de ataque e a influência do vento cruzado levaram a problemas quando os helicópteros "IA" tentavam pousar com vento cruzado.

Para o «Black Shark», o mesmo "Modelo de Voo Padrão" (SFM) será usado para os helicópteros controlados por "IA" que foram usados por helicópteros controlados por pilotos em «Lock On». Esta FM melhorada proporcionará um desempenho de voo de "AI" muito mais realista. Apenas o Advanced Flight Model (AFM) apresentado no Su-25T do simulador «Lock On: Flaming Cliffs» (www.lockon.co.uk) é superior.
Veículos Terrestres, Navios e Armas


Veículos terrestres, navios e armas como bombas, foguetes, mísseis e canhões foram significativamente melhorados em «Black Shark». Melhorias incluem:
Ao usar o SFM, as equações para derivar o movimento do helicóptero levam em consideração as características inerciais e aerodinâmicas exclusivas do helicóptero. O modelo da turbina utiliza os fatores de empuxo e razão de queima de combustível para determinar a velocidade e a altitude do helicóptero. Estes cálculos permitem que o SFM simule as características de voo realísticas dos helicópteros (aceleração, razão de subida, altitude máxima, velocidade máxima e mínima, raio de giro, taxas de curva instantânea e sustentada, alcance e duração do voo). Ao converter o helicóptero "AI" «Black Shark» no padrão SFM, foi necessário modificar mais de 50 helicópteros!
- Com este avanço na dinâmica de voo dos helicópteros "AI", agora é possível para a "AI" conduzir manobras de voo mais avançadas e também táticas de combate:
- A "AI" agora pode iniciar subidas e descidas a uma velocidade otimizada, usando cálculos automáticos
- Melhorias no nível de entrada dos controles mecânicos em relação à velocidade aerodinâmica
- Os helicópteros "AI" agora são capazes de realizar pousos e decolagens de vento cruzado nas pistas e porta-aviões
- Os helicópteros "AI" agora permanecem em formação de maneira mais realista
- Os helicópteros "AI" agora usa meios mais realistas para evitar e manobrar contra ameaças
- Limitações de velocidade realistas foram implementadas
- Os helicópteros "AI" agora retornam à base de maneira mais realista quando estão com pouco combustível
- Manobrar dentro do alcance visual em combate foi melhorado
- Os helicópteros "AI" têm melhores habilidades de fuga quando atacados por trás
- Os helicópteros "AI" melhoraram a precisão ao atacar com canhões e foguetes
Essas melhorias também levam a um combate mais realista entre o piloto virtual e o helicóptero "AI".
- O estabilidade dos veículos terrestres ativos disponíveis no editor de missões foi grandemente expandido. Estes novos modelos incluem novos tipos de veículos, bem como melhorias substanciais em veículos existentes do «Flaming Cliffs». O nível ou detalhamento dos objetos 3D, texturas e animações foram radicalmente melhorados em comparação com os do «Flaming Cliffs».
- Cada veículo terrestre pode agora usar vários tipos de armas simultaneamente. Por exemplo: um tanque pode agora engajar outros veículos terrestres com sua arma principal enquanto, ao mesmo tempo, engaja helicópteros e infantaria com metralhadoras pesadas e leves. Isso resulta em um processo de engajamento muito mais realista para veículos terrestres.
- Os algoritmos balísticos para canhões e armas foram radicalmente aprimorados para incluir simulação física completa. O voo de tais projéteis é agora muito realista.
- Grupos ou veículos terrestres agora usam algoritmos muito mais avançados para determinar como o grupo distribuirá seu poder de fogo, alterará seu movimento e mudará sua formação para reagir melhor a um alvo/ameaça. Isso levou a batalhas terrestres muito mais realistas, nas quais as unidades se comportam com inteligência.
- Os algoritmos de simulação de veículos terrestres, navios e armas foram melhorados para proporcionar uma melhoria significativa no desempenho do sistema. Isso permite que os usuários coloquem muitas unidades detalhadas em uma missão sem uma grande penalidade de desempenho do sistema.
- Todos os veículos agora incluem vários níveis de detalhe (LOD) e também ajudam no desempenho do sistema.
- Unidades de infantaria a pé estão agora incluídas.
Simulação do Voo de Helicópteros AI
A principal característica dos modelo AI é uma aproximação de forças que são aplicadas ao corpo rígido de um helicóptero. Com o modelo AI, as forças aerodinâmicas na fuselagem e as forças dos rotores são calculadas usando os mesmos algoritmos do modelo avançado com algumas simplificações para reduzir os cálculos desnecessários. Por exemplo: a simulação do modelo do rotor padrão calcula a velocidade indutiva e o empuxo da mesma maneira que o modelo avançado, mas com um número reduzido de segmentos calculados considerados. O movimento do flap das pás e o vetor de elevação do rotor são calculados usando os parâmetros de voo atuais e as entradas de controle.
A parte aerodinâmica do modelo AI inclui um cálculo dinâmico da fuselagem como fonte de arrasto aerodinâmico e como uma empenagem que fornece a estabilidade de voo. Todos os helicópteros AI da série DCS possuem seu próprio conjunto exclusivo de propriedades de fluxo de ar empenagens e fuselagem.

Como no simulador avançado, os helicópteros AI podem usar trem de pouso triciclo composto de rodas, um amortecedor de compressão e um amortecedor não-simétrico.
A simulação de uma única fuselagem e empenagens que compõem um helicóptero AI proporciona propriedades de voo realistas quando um helicóptero é danificado. Isso é feito removendo elementos dos helicópteros destruídos dos cálculos aerodinâmicos. Rotor de cauda, asas de topo, partes do rotor principal (rotores), etc. podem ser perdidos.
Mesmo controlado pelo computador, o IA ainda deve controlar o helicóptero por meio de entradas nos pedais do leme, cíclico e coletivo. Os algoritmos de controle da IA levam em conta as limitações de voo para cada tipo de helicóptero.
Mundo do "Tubarão Negro"

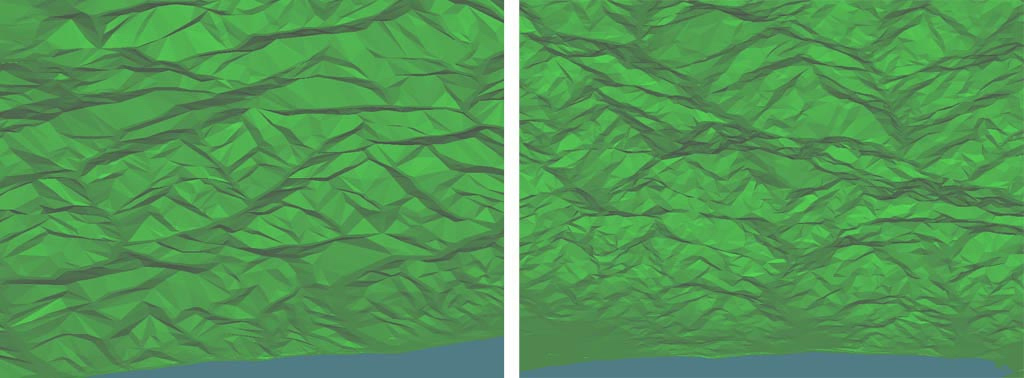
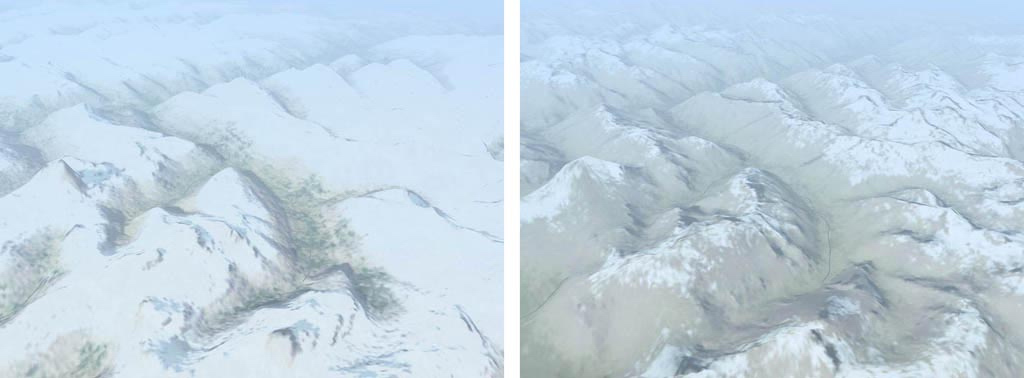
O detalhe do mapa da altura do terreno foi aumentado em «DCS: Black Shark», a fim de fornecer um campo de altura mais realista para sobrevoar em um helicóptero em baixa altitude. Dada a natureza das operações de helicópteros no ataque, ter um mapa de altura detalhada era imprescindível. Grandes porções da matriz de elevação da altura do terreno «DCS: Black Shark» contêm o dobro do número de triângulos que foram usados para criar o terreno do «Flaming Cliffs».
A matriz de elevação do terreno é particularmente detalhada na área Mineralnye Vody do mapa. A imagem da esquerda acima mostra a matriz de elevação da mesma altura das imagens anteriores. A imagem à direita acima mostra o centro da área, mas com o dobro da escala (ampliada). Note que a malha ainda está muito detalhada.
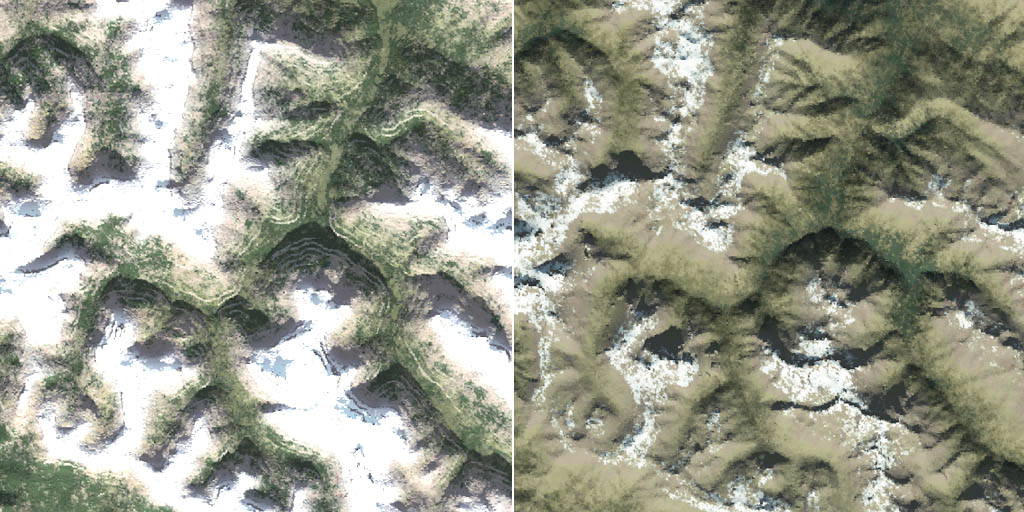
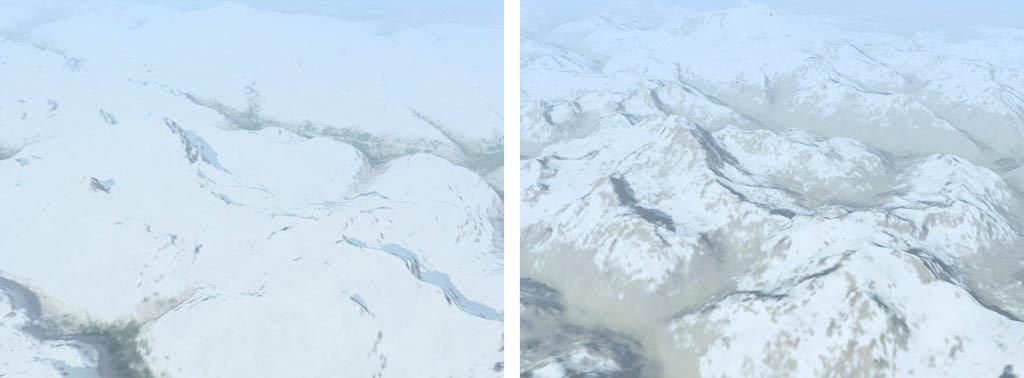
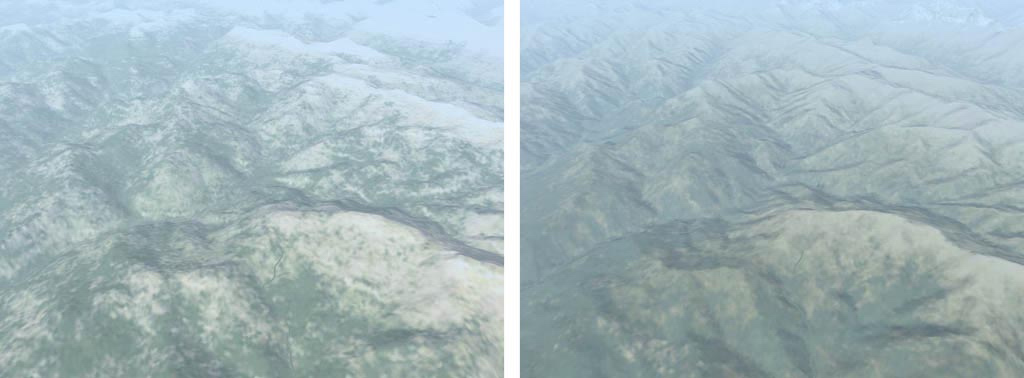
Além de uma malha de altura mais fina, também aumentamos a resolução das texturas do terreno para centros populacionais, campos agrícolas e bases aéreas. As outras áreas de textura foram modificadas para se adequar com maior precisão à matriz de altura do terreno. As imagens abaixo comparam a mesma região em «Flaming Cliffs» e «DCS: Black Shark». A combinação do mapa da altura mais detalhado e as texturas do solo de alta resolução fornecem um ambiente de terreno muito mais detalhado para voar e combater.
Exemplos na malha do terreno e texturas normais e na esquerda imagem do terreno melhorado e texturas melhoradas à direita.
Para apoiar as operações aéreas nas novas áreas, o «DCS: Black Shark» acrescentou seis novos aeródromos, dois na Rússia e quatro na Geórgia. Essas novas bases aéreas são representadas pelos pontos azul-claros da imagem no início desta seção.
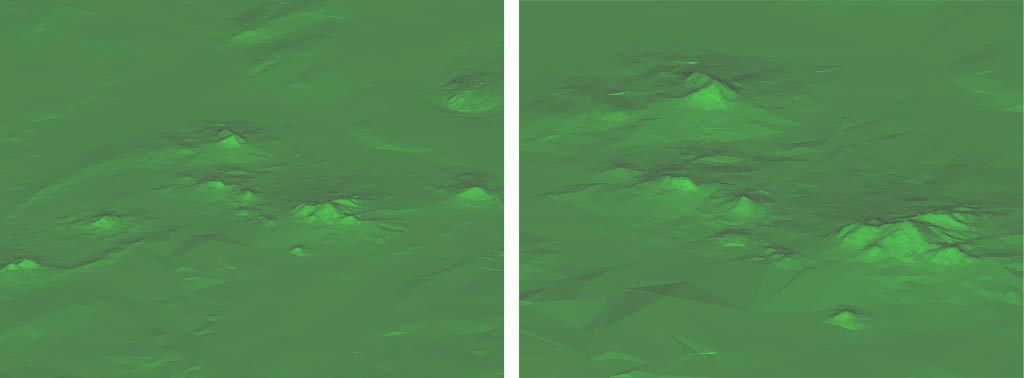
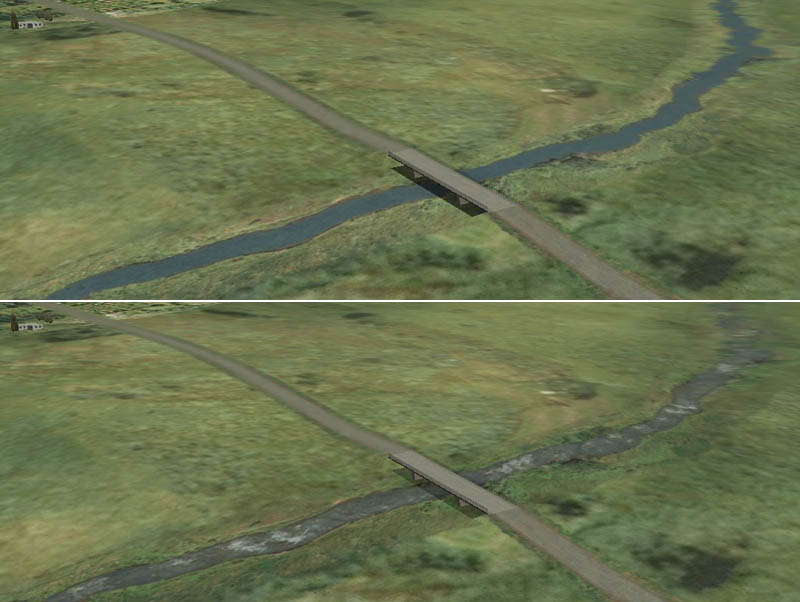
Para dar aos pequenos riachos uma aparência mais natural, o «DCS: Black Shark» incluirá a animação da textura da água. As imagens abaixo comparam fluxos em «Flaming Cliffs» e «DCS: Black Shark».
Exemplo estático do rio no topo e rio animado abaixo
- Sinalização Não Direcional (NDB)
- NDB do Localizador Externo do Aeródromo
- NDB do Localizador Interno do Aeródromo
- Marcador NDB
- Estação de Transmissão
Embora não seja usado pelo KA-50, o código de simulação suporta vários outros tipos de rádio-auxilio para futuros helicópteros, teatros de operação e cenários de campanha, incluindo:
- RSBN
- VOR
- TACAN
- VOR/TAC
- DME
- VOR/DME
- ILS
- Indicador ILS
O modelo DCS KA-50 inclui o seguinte equipamento de rádio:
- Localizador automático de direção ARK-22 (ADF)
- Receptor de Sinalizador ID
- Rádio R-800L UHF
- Rádio R-828 UHF
- Intercomunicador SPU-9
- Sistema avançado de mapas móveis ABRIS (AMMS)


Para conduzir a navegação por rádio, o piloto virtual do KA-50 pode usar o ARK-22 ADF e o ABRIS AMMS.
O ARK-22 ADF controla a agulha do Indicador Magnético de Rádio (RMI) no Indicador de Situação Horizontal (Horizontal Situation Indicator - HSI), apontando-o na direção do sinal de transmissão. Usando o ADF, o piloto pode selecionar um dos oito canais predefinidos, cada um dos quais armazena duas frequências de rádio. Ao atingir o transmissor da frequência atualmente selecionada, o ADF inicia automaticamente o retorno ao segundo e vice-versa. Alternativamente, o piloto pode selecionar manualmente qual das duas frequências no canal selecionado é a direção de "casa". Por exemplo, a primeira freqüência em um determinado canal ADF pode ser definida como "home" na baliza externa do localizador do aeródromo e a segunda na baliza interna do localizador, etc. O piloto pode verificar a seleção da baliza correta configurando o ADF para fornecer um sinal sonoro. transmissão da identificação do farol. Enquanto na vida real as frequências para cada canal ADF são definidas pelo pessoal de terra, o piloto virtual DCS pode editá-las nos arquivos de configuração do ADF fora da simulação.


Usando o ABRIS AMMS, o piloto pode selecionar qualquer estação de rádio no banco de dados para orientar ou obter mais informações, incluindo seu código e ID. Utilizando a página de opções ABRIS, o piloto virtual pode atribuir as agulhas ABRIS RMI 1 e/ou 2 nas páginas ARC e HSI para exibir o azimute do radio farol.
O sistema de intercomunicação SPU-9 fornece transmissão de áudio e microfone para o piloto. Ele pode ser definido como UHF1 (R-828), UHF2 (R-800L1), KV (ADF e Marker Beacon) e NOP (link ground).
O rádio R-828 é usado para comunicação com unidades de solo em combate e não faz parte do equipamento de navegação.
O simulação física da rádio DCS calcula todas as transmissões em tempo real e determina a intensidade do sinal local de acordo com inúmeras variáveis, incluindo a hora do dia (efeito ionosfera), tipo de superfície (terreno acidentado, superfície pavimentada, água, etc.), distância ao transmissor potência do transmissor, etc. Como o tráfego de rádio é transmitido "ao vivo", a recepção pode ser interrompida a qualquer momento por interferência natural ou artificial, como topologia de terreno ou configuração de rádio. Por exemplo, se o piloto virtual mudar sua freqüência de rádio, a recepção cessará, mas poderá retornar ao seu ponto real ao reconfigurar a rádio de volta à freqüência do transmissor. As unidades AI reagem às chamadas de rádio apenas se a transmissão for bem sucedida.
Os arquivos de configuração de freqüência permitem que o piloto DCS configure as várias frequências usadas pelas unidades no simulador, incluindo o próprio voo, torre, AWACS, etc.
- Indicador de pressão do sistema hidráulico principal
- Indicador de pressão do sistema hidráulico comum
- Interruptor hidráulico principal dos servo-atuadores do servo-comum
- Servo atuadores. Atuadores de inclinação e bancada, atuador de guinada e atuador coletivo
- Acumuladores hidráulicos de pistola móvel
- Trava de parada da pistola em movimento
- Atuador vertical de pistola móvel
- Atuador horizontal de pistola móvel
- Arma em movimento
- Interruptor de seleção de emergência
- Recuar/estender a alavanca de mudanças
- Válvula de retenção da trava da engrenagem esquerda
- Válvula de retenção de bloqueio de engrenagem do nariz
- Válvula de retenção da trava da engrenagem direita
- Atuador da engrenagem esquerda
- Atuador da engrenagem do nariz
- Atuador de engrenagem direita
- Atuador da porta da engrenagem direita
- Atuador da porta da engrenagem esquerda
- Indicador de pressão dos freios
- Atuador do freio da roda esquerda
- Atuador do freio da roda direita
- Acumulador hidráulico de freios
- Bomba de sistema comum
- Tanque do sistema comum
- Acumulador de sistema comum
- Bomba do sistema principal
- Tanque do sistema principal
- Acumulador do sistema principal
O sistema hidráulico KA-50 é usado para fornecer energia hidráulica a vários sistemas de helicópteros. Isso consiste em dois subsistemas:
- O sistema hidráulico principal fornece servo-atuadores de controle de vôo para a arfagem, margem, guinada e coletivo. No caso de uma falha comum do sistema, também garante a extensão do trem de pouso de emergência.
- O sistema comum fornece o sistema de extensão/retração do trem de pouso, os freios das rodas principais e a direção do canhão. Em caso de falha do sistema principal, ele fornece servo-atuadores de controle de voo.
Cada sistema consiste em uma bomba hidráulica, um tanque de fluido hidráulico, filtros, válvulas, tubos e elementos de controle. A fonte de pressão para ambos os sistemas é fornecida por bombas de deslocamento variável. A bomba do sistema principal é montada na caixa de engrenagens do acessório esquerdo da caixa de engrenagens principal e opera quando os rotores são acionados pelos motores e também quando estão em rotação automática. A bomba do sistema comum é montada na caixa de mudanças de acessórios traseiros da caixa de engrenagens principal e opera quando os rotores estão girando ou quando a APU está ligada.
Existem acumuladores hidráulicos em cada sistema para evitar oscilações de pressão. No sistema de freios há um acumulador separado para alimentar os freios de estacionamento (por até 2 horas) após os motores serem desligados, ou alimentar os freios durante o táxi em caso de falha comum do sistema. O tanque do sistema principal tem capacidade para 13 litros e o tanque do sistema comum tem capacidade para 17 litros.
O controle do sistema hidráulico é feito através dos indicadores de pressão e temperatura do fluido e dos pressostatos. Os indicadores estão localizados na parte superior do painel de controle da cabine. Os indicadores incluem marcas que especificam o intervalo operacional de cada indicador:
- Indicadores de pressão de sistemas principais e comuns.
- Marcas para 64 e 90 kgf/cm³
- Pressão do acumulador.
- Marcas para 60 e 90 kgf/cm³.
- Indicador de pressão do sistema de freio.
- Marcas para 0 e 22 kgf/cm³.
- Indicadores de temperatura de fluido de sistemas.
- Marcas para -10° С e +90° С
- Faixa de operação de pressão 65 ... 90 kgf/cm³
- Temperatura do fluido em voo não superior a +85° С
Pressostatos são instalados em:
- Controles de voo servo atuadores para indicar queda de pressão
- Sistema de freio da roda para indicar queda de pressão no acumulador
- Na linha de pressurização dos tanques









Comentários
Postar um comentário