Digital Combat Simulator: Su-27 Flanker

O Su-27, codinome da OTAN Flanker (Flanqueador), é um dos pilares da moderna aviação de combate russa. Construído para combater o F-15 Eagle americano, o Flanker é um bi turbina, supersônico, altamente manobrável é um caça de superioridade aérea.
O Flanker é igualmente capaz de atingir alvos bem além do alcance visual, como em combate a curta distância, devido a sua surpreendente capacidade de manobra em alto angulo de ataque e baixa velocidade. Usando seu radar e sistema de rastreamento e acoplagem por infravermelho furtivo, o Flanker pode empregar uma grande variedade de mísseis guiados por radar semi-ativo e infravermelho.
O Flanker também inclui um designador montado no capacete que permite que você simplesmente olhe para um alvo para acoplar! Além de suas poderosas capacidades aéreas, o Flanker também pode ser armado com bombas e foguetes não guiados para cumprir um papel secundário de ataque ao solo.
O Su-27 para DCS: World foca na facilidade de uso sem interação complicada na cabine, reduzindo significativamente a curva de aprendizado. Como tal, o Su-27 para DCS: World apresenta comandos de teclado e Manche com foco nos sistemas mais críticos da cabine.
Principais características do Su-27 para DCS World:
- Um simulação de voo de nível profissional fornece física de voo inigualável que permite que você realmente sinta como é voar com este incrível avião.
- Um verdadeira simulação do modelo dos sistemas de controle de voo do Su-27 que lhe permite realizar a “Cobra Pugachev” e outras manobras como "Tailslide" , "Kulbit" que são "fora do envelope”.
- "Display Head Down" (HDD) atualizado com modos de navegação e link de dados mais realistas.
- Cabine altamente detalhada, com seis graus de liberdade (6DoF).
- Modelo exato do Su-27 Flanker, com marcações de esquadrão e armas.
- Nova ação instantânea, missões individuais e missões de treinamento interativo.
- Combata o F-15C Eagle em duelo.
Introdução


Projeto
O avião tem uma estabilidade estática próxima de zero e, portanto, requer um sistema "Fly-by-Wire". O sistema de controle por cabo elétrico da arfagem única SDU-10, controla a arfagem do avião para garantir estabilidade e capacidade de controle para o piloto, aumentando o desempenho aerodinâmico, limita a sobrecarga e o ângulo de ataque quando necessário e diminui a carga aerodinâmica da fuselagem.
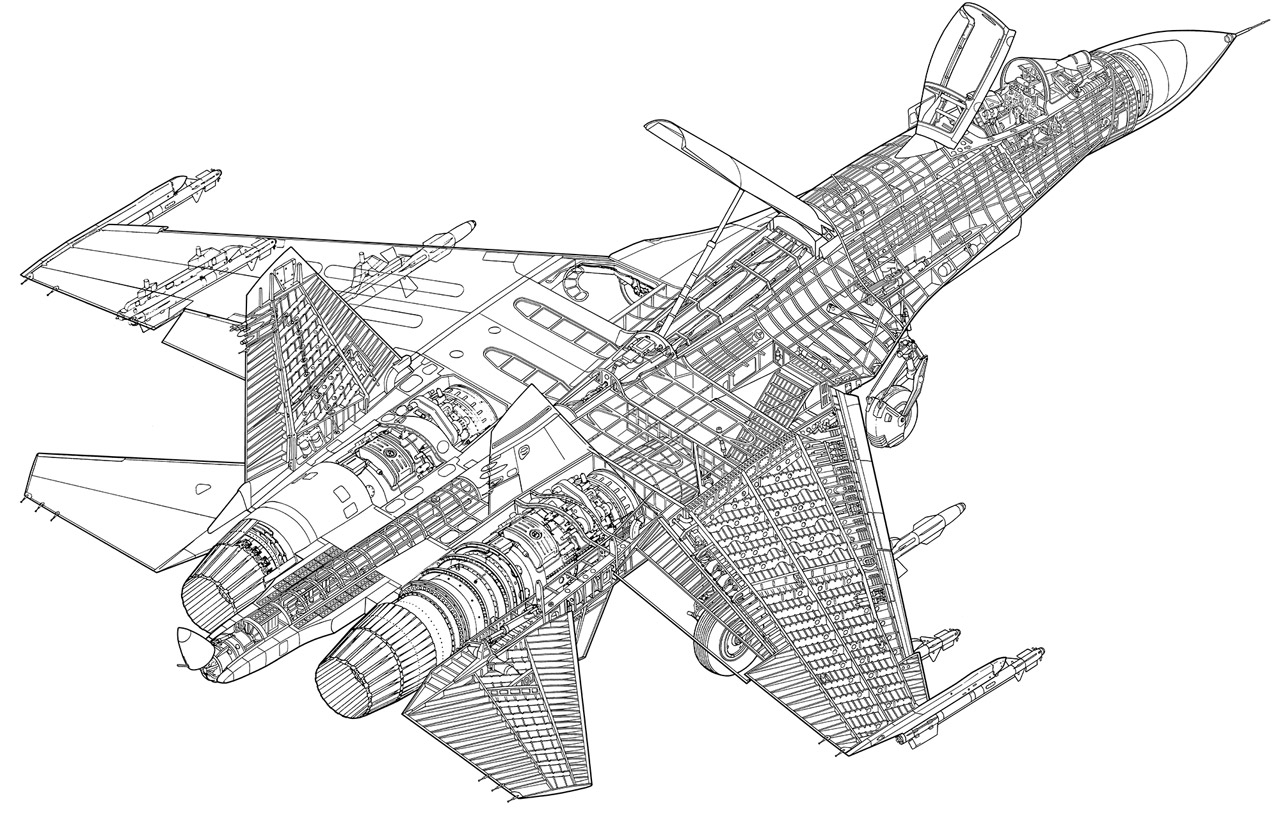
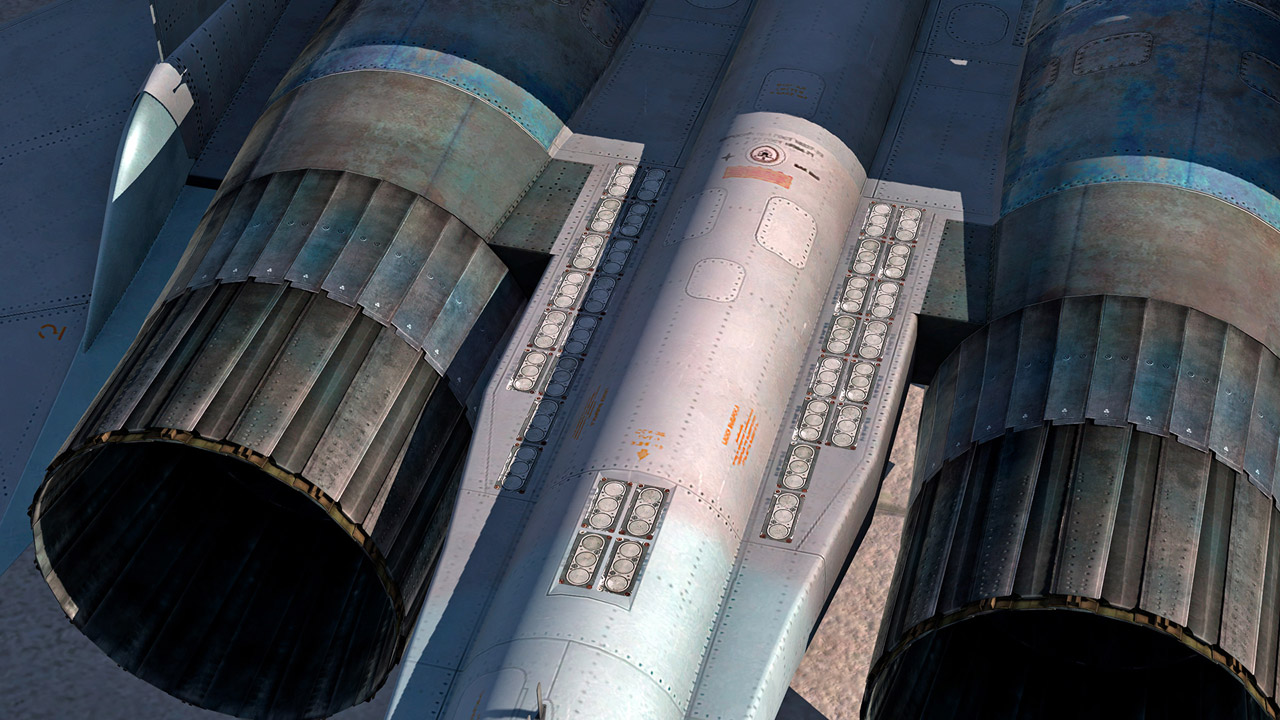
Dois turbo fans de pós-combustão AL-31F são colocados em fuso-motores separadas e amplamente espaçadas que são montadas sob a elevação do corpo. As entradas de ar estão equipadas com rampas variáveis.
O Su-27 tem duas aletas verticais instaladas nas laterais externas da fuselagem e duas aletas centrais embaixo. O freio aerodinâmico é colocado no centro da seção intermediária do avião, atrás da cabine. O trem de pouso triciclo do Su-27B e do Su-27UB tem uma única roda em cada escora. A roda dianteira é equipada com um para-lamas que protege contra danos por objetos estranhos (FOD).
Sistemas e Aviônicos
O Su-27 básico é equipado com o sistema de controle de disparo SUV-27, que é incorporado ao radar de observação RLPK-27, o sistema de observação eletro-ótico OEPS-27, o sistema de sinal integrado SEI-31, e o interrogador "IFF" (Identification Friend Or Foe) "Identificador Aliado ou Inimigo" e o sistema de teste integrado. O sistema de controle de disparo integrado ao sistema de navegação de voo PNK-10, conexão de comando de rádio, sistema IFF, equipamento de transmissão de dados e sistema de auto-defesa EW.
Sistemas e Aviônicos
O sistema é controlado pelo computador digital Ts-100 e inclui o Radar N001 versão (RLPK-27) de pulso Doppler com capacidade busca terrena "LookDown/ShotDown" (Rastreamento/Disparo para Baixo), com um alcance de 80-100 km no hemisfério frontal e 30-40 km no hemisfério traseiro para um alvo do tamanho de um caça. Ele pode rastrear simultaneamente até dez alvos aéreos no modo "Track While Scan" (Acoplagem Durante A Varredura), também conhecido como "TWS" e fornece a interceptação do alvo com prioridade máxima.

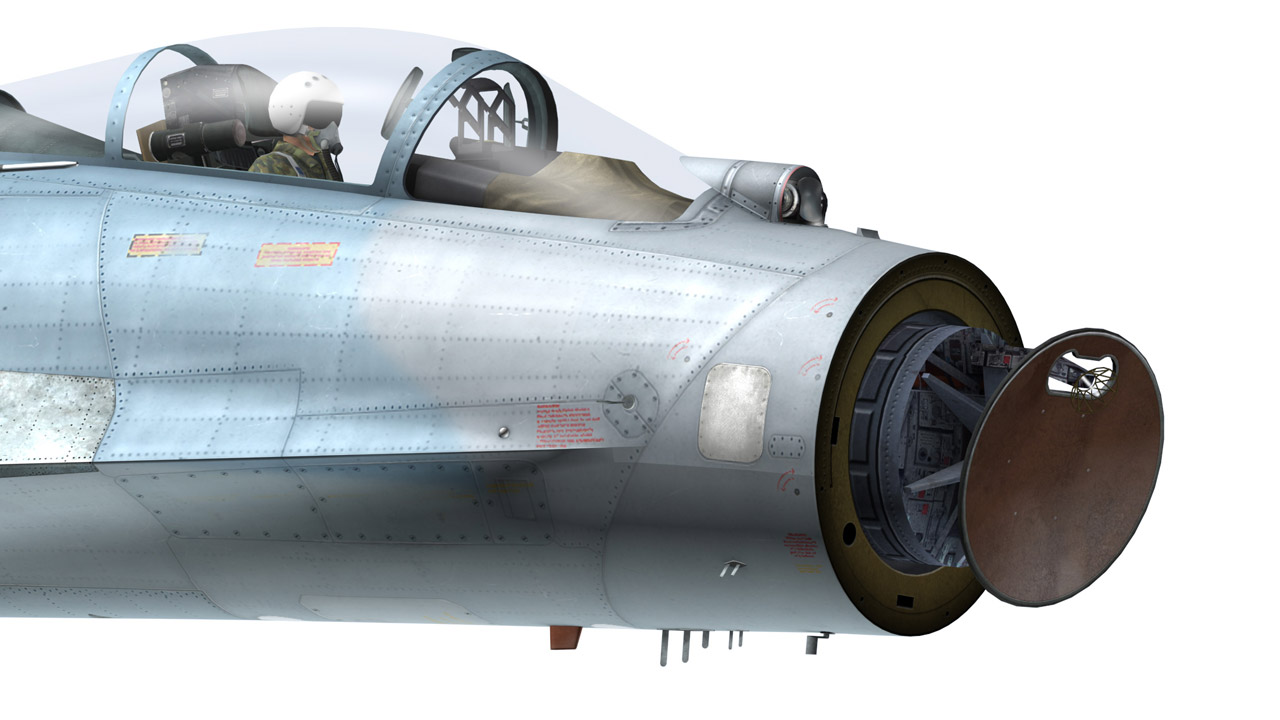
O sistema de observação eletro-ótico OEPS-27 consiste no sistema OLS-27 de acoplagem e rastreamento por infravermelho/laser (IRST) e o designador de alvo Shchel-3UM montado no capacete que é controlado pelo computador digital Ts-100. O sensor OLS-27 é colocado à frente da cobertura da cabine ao centro. O sistema aquisição e rastreio de alvos aéreos por assinatura térmica. A viseira montada no capacete e o telêmetro a laser do IRST também podem ser usados para acoplar visualmente e determinar coordenadas de alvos aéreos e de superfície.
O sistema de indicação integrado SEI-31 fornece dados de voo, navegação e observação de dados no ILS-31 "Visor na Altura dos Olhos" "Head-Up Display" (HUD) e o "Visor de Cabeça Abaixada" (Head Down Display) (HDD) (MFD). O sistema de autodefesa EW fornece alerta à tripulação quando iluminado pelo radar inimigo e emprega contra medidas passivas e ativas. O avião é equipado SPO-15 Beryoza RWR e o APP-50 distribuidor de papel metálico (Chaff) e Sinalizadores (Flare) que está localizado na seção da cauda entre os bocais da turbina. Além disso, o avião pode transportar os casulos Sorbtsiya ECM ativos na pontas das asas.
O sistema de indicação integrado SEI-31 fornece dados de voo, navegação e observação de dados no ILS-31 "Visor na Altura dos Olhos" "Head-Up Display" (HUD) e o "Visor de Cabeça Abaixada" (Head Down Display) (HDD) (MFD). O sistema de autodefesa EW fornece alerta à tripulação quando iluminado pelo radar inimigo e emprega contra medidas passivas e ativas. O avião é equipado SPO-15 Beryoza RWR e o APP-50 distribuidor de papel metálico (Chaff) e Sinalizadores (Flare) que está localizado na seção da cauda entre os bocais da turbina. Além disso, o avião pode transportar os casulos Sorbtsiya ECM ativos na pontas das asas.


Cabine
O esboço básico da cabine do Su-27 consiste em instrumentos analógicos, HUD e "Head Down Display" (Mostrador Principal Abaixo) (HDD), também conhecido como (MFD) para exibir dados de radar e visão eletro-óptica (IRST). Em ambos os lados do painel de controle do HUD, existem sensores para o sistema de designação de alvo montado no capacete. No lado direito abaixo do HDD, o indicador RWR está localizado.


Peso na Decolagem:
- - Normal (incluindo 2x R-27R + 2x R-73, 5,270 kg combustível), 23,430 kg
- - Máximo, 30,450 kg
Combustível interno máximo, 9,400 Kg
Carga máxima, 4,430 Kg
Teto de serviço (sem carga externas e equipamento), 19,5 Km/19,500 m
Velocidade máxima de voo ao nível do mar (sem carga externa e equipamento), 1,400 Km/h
Mach Máximo (sem carga externa e equipamento) 2.35 Ma
G-Limite (operacional) +9
Alcance máximo de voo (com mísseis 2x R-27R, 2x R-73 lançados a meia distância):
- - ao nível do mar, 1,340 Km
- - em altitude, 3,530 Km
Distância de decolagem com peso normal, 450 m de pista
Aterrizagem com peso normal (com paraquedas de frenagem), 620 m de pista
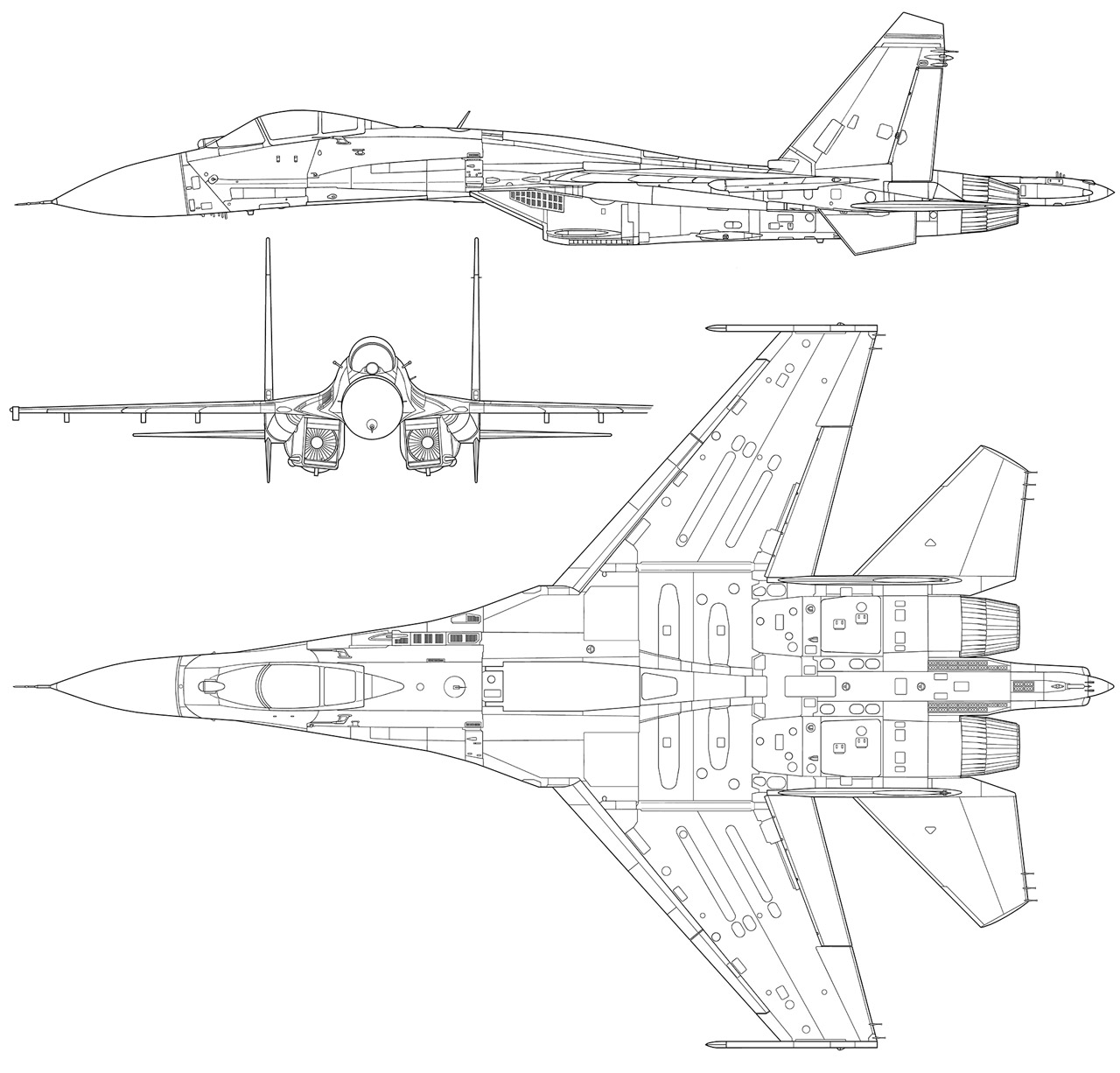
Dimensões do avião:
- - comprimento, 21,9 m
- - envergadura, 4,7 m
- - altura, 5,9 m
Número e tipo de turbinas: 2x AL-31F
Propulsão:
- - na potência máxima (Militar), 7,670 Kgf
- - no pós-combustor, 12,500 Kgf
Armamento
Canhão: 1x GSh-30-1 de 30-mm, com 150 cartuchos.
Canhão: 1x GSh-30-1 de 30-mm, com 150 cartuchos.
Mísseis Aéreos
Até 6x R-27R "SARH" mísseis aéreos guiados por radar semi-ativo.
Até 6x R-27R "SARH" mísseis aéreos guiados por radar semi-ativo.

Até 6x R-27ER "SARH" mísseis aéreos guiados por radar semi-ativo com distância melhorada.

2x R-27T "IR" mísseis aéreos guiados por infravermelho.

2x R-27ET "IR" mísseis aéreos guiados por infravermelho semi-ativo com distância melhorada.

Até 6x R-73E "IR" mísseis aéreos guiados por infravermelho do tipo (disparar e esquecer).

Armas Ar-Superficie
Su-27 pode carregar uma lista maciça de bombas não guiadas e foguetes.
Bombas de uso geral de alta potência FAB-100, FAB-250, FAB-500.

Bombas perfuradoras de concreto BetAB-500.

Munições de cacho RBK-250, RBK-500, KMGU.

Casulo de foguetes não guiados S-8 de 80-mm, S-13 de 120-mm, S-25 250-mm.

Bomba de iluminação SAB-100.

Sistema de Controle de Voo (FCS)
O Su-27 é controlado por uma combinação de subsistemas mecânicos e controle por cabo elétrico. O controle longitudinal é mantido pela deflexão síncrona dos estabilizadores e o controle lateral é mantido pela deflexão diferencial dos flaperons, estabilizadores e lemes. O controle direcional é mantido pela deflexão dos lemes.
O sistema de controle mecânico é destinado a deflexão diferencial de flaperons como parte do sistema de controle lateral; deflexão síncrona de flaperons durante a decolagem e aterrissagem; deflexão do leme durante o movimento do pedal; e carregamento e ajuste do controle de voo artificial.
O sistema de controle por cabo elétrico, destina-se ao controle manual do avião através de canais longitudinais e laterais para fornecer a estabilidade desejada e as qualidades do controle; para limitar o ângulo de ataque e carga G; para controlar as bordas das asas; e para controle síncrono dos flaperons durante as manobras.
Canal Longitudinal
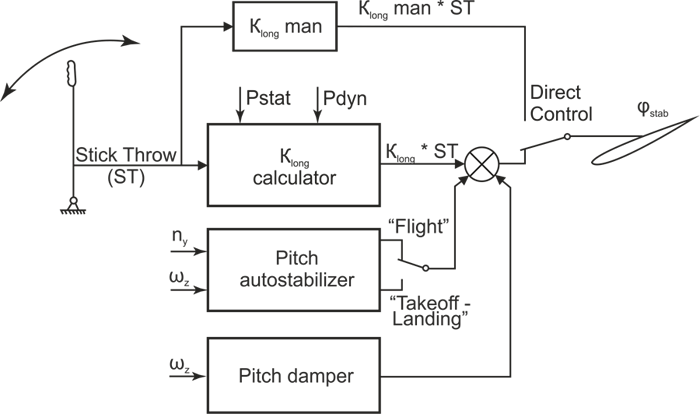
Diagrama de blocos esquemáticos do controle do estabilizador no canal longitudinal
O canal longitudinal do sistema de cabo elétrico possui três modos operacionais:
Modo TAKEOFF-LANDING: Neste modo, o estabilizador desvia de acordo com as entradas do manche e o ritmo da arfagem.
Modo FLIGHT: Neste modo, o estabilizador desvia de acordo com as entradas do manche, e ritmo da arfagem e força G.
Modo de EMERGÊNCIA DE CONTROLE DIRETO: neste modo, o estabilizador desvia somente de acordo com as entradas do manche.
Os modos TAKEOFF-LANDING e FLIGHT do sistema por cabo elétrico são comutados automaticamente de acordo com a posição do trem de pouso.
O modo DIRECT CONTROL é ligado se o sistema por cabo elétrico falhar. Pilotar neste modo requer cuidados especiais; o voo é caracterizado por:
Estabilidade da arfagem insuficiente do avião
Baixo amortecimento aerodinâmico
Aumento longitudinal da sensibilidade do manche
Quando estiver neste modo, compense a tendência do avião de alterar a arfagem usando entradas no manche curtas e preemptivas. Evite entradas abruptas e grandes. O ângulo de ataque neste modo não deve exceder 10 graus (o limitador do envelope de voo não restringe o ângulo neste modo); executar voltas com uma margem não mais do que 45 graus.
É neste modo que a manobra acrobática "Cobra Pougachev" é realizada.
O sistema por cabo elétrico é um sistema de controle da trajetória. Em outras palavras, se o manche permanecer na mesma posição, o sistema manterá o caminho de voo definido. É por isso que a redução da velocidade do ar (por exemplo) e a resultante diminuição do levantamento e aumento do ângulo de ataque, levará o avião a tentar manter a trajetória de voo inicial e a impedir que o avião desça. Isso resultará na degradação da estabilidade da velocidade do ar até a estabilidade neutra.
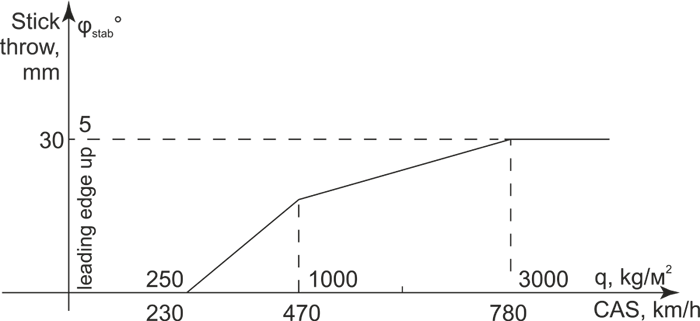
O sistema de controle longitudinal inclui uma lei de ajuste de velocidade no ar que gera um sinal proporcional ao ar de impacto. Quando a velocidade indicada no ar é aumentada, o FCS faz com que a deflexão dos estabilizadores (até 5 graus) caia para baixo. Ao desacelerar, faz com que o nariz suba. Isso imita a estabilidade da velocidade do avião, que é neutra na presença de um sinal de experiência de carga G. A imitação da velocidade no ar permite que o piloto use o manche como ele ou ela faria com um avião estável.
Esta é uma lei lógica do FBW e baseia-se na deflexão longitudinal do tiquetaque versus a pressão do ar do aríete. Essa lei de controle faz com que o piloto "sinta" a capacidade de voar em um avião com velocidade no ar. A lei também tem a intenção de aumentar a segurança de voo ao desacelerar. Como o avião é neutro e estável por velocidade, deve aumentar o ângulo de ataque em voo desacelerado. A lei de controle acima mencionada impede isso, desviando estabilizadores para diminuir o AoA.
Ao acelerar, para manter o nível do avião, ele deve ser ajustado "com o nariz para baixo" à medida que a velocidade no ar aumenta.
Canal lateral
O controle de rolagem é executado por intermédio dos flaperons trabalhando como ailerons (flaperons também são desviados para baixo como nos flaps, quando no modo decolagem) e por estabilização diferencial. Com o aumento do ângulo de ataque, os lemes são usados para controlar o rolamento (consulte o canal Direcional).
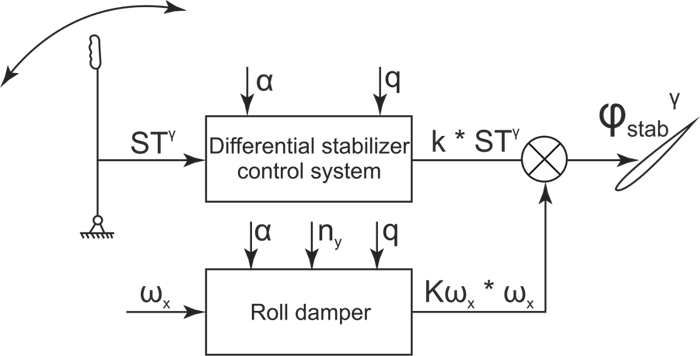
Os flaperons e lemes pertencem à parte mecânica do sistema de controle. O canal lateral do sistema de controle por cabo elétrico, que inclui o mecanismo de controle diferencial e amortecedor de rolagem, controla a deflexão do estabilizador diferencial.
O mecanismo de controle diferencial é acionado por entradas laterais e fornece deflexão diferencial do estabilizador. O grau dessa deflexão depende da velocidade no ar indicada e do ângulo de ataque.
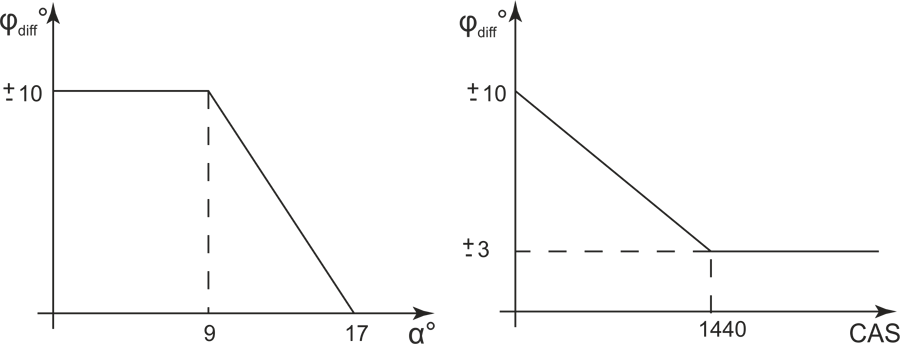
A redução da deflexão do estabilizador diferencial à medida que o V aumenta exclui grandes cargas na seção da cauda da fuselagem em velocidades elevadas indicadas e sua redução com o aumento do ângulo de ataque excetua a manifestação da reversão da guinada de rolagem.
O amortecedor de rolagem fornece deflexão ao estabilizador diferencial pela razão da rolagem e destina-se a neutralizar oscilações de rolagem de curto período.
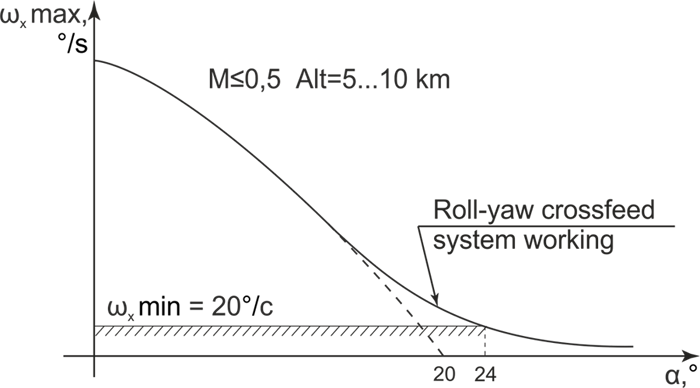
Conforme indicado, a velocidade do ar aumenta em baixa e média altitude, a razão máxima de rolagem ωх max é aumentada, alcançando o valor mais alto dentro de uma velocidade relativa de 600 ... 800 km/h. Aqui, a facilidade máxima do controle lateral do avião é observado.
Com um aumento adicional da velocidade do ar indicada, o manuseio lateral deteriora-se gradualmente, o que se torna perceptível em velocidades do ar superiores a 1200 km/h.
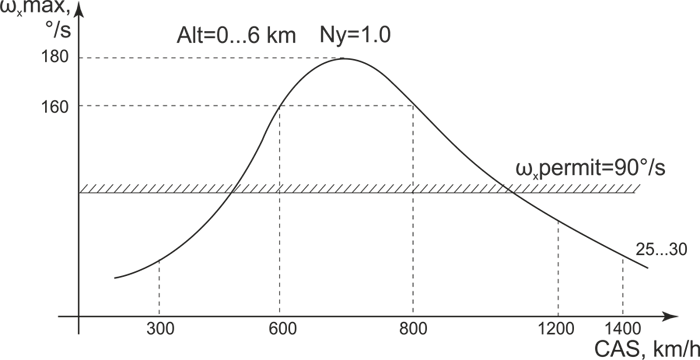
Essa dependência do manejo lateral com base na velocidade indicada é explicada pelos seguintes fatores:
Um aumento de ωx max para VIAS = 600 ... 800 km/h é causado por um aumento da pressão de ar do aríete juntamente com alta eficiência de flaperons e estabilizador diferencial.
Uma diminuição de ωx max com VIAS = acima de 800 km/h é causada por uma redução das deflexões angulares disponíveis dos flaperons devido à energia insuficiente dos atuadores hidráulicos e uma diminuição da deflexão do estabilizador diferencial disponível visando limitar as cargas na parte "flexível " da setor da cauda.
Canal Direcional
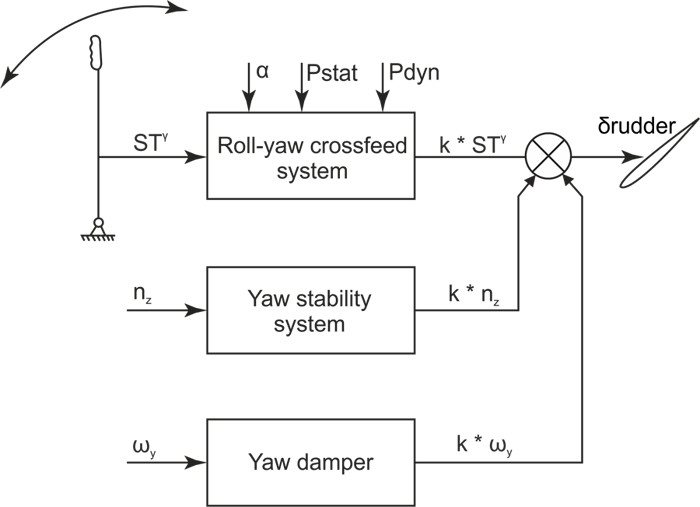
O sub-canal de guinada do sistema de controle por cabo elétrico inclui os seguintes dispositivos automáticos:
O sistema de alimentação cruzada Guinada/Rolagem opera de acordo com as entradas laterais. Desvia os lemes para o mesmo lado que o manche. Isso elimina o deslize adverso causado pela diferença de arrasto por meio das asas. Também melhora a controlabilidade lateral, especialmente em altos ângulos de ataque.
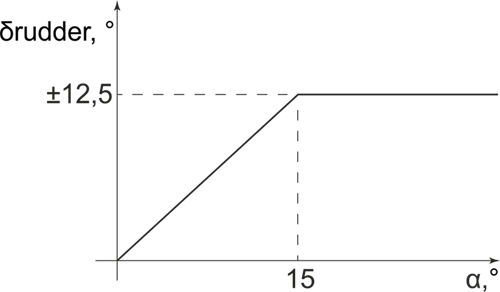
Devido a isso, o controle lateral é preservado até um ângulo de ataque de 28 graus e não há inversão de rotação devido ao movimento do manche de controle.
O sistema de estabilidade da guinada opera de acordo com as entradas de aceleração lateral e fornece as características necessárias para a estabilidade da guinada do avião, devido ao fato do avião ter estabilidade de guinada estatisticamente descontraída. Isso se deve às propriedades peculiares da configuração aerodinâmica do Su-27 à popa do centro de gravidade, à área alongada da asa lateral da fuselagem e ao deslocamento da aleta para a frente. O princípio de funcionamento do sistema de estabilidade de guinada do Su-27 é semelhante ao do sistema de aumento da estabilidade da arfagem.
O amortecedor de guinada fornece as características necessárias para a estabilidade dinâmica lateral.
A fim de diminuir as cargas nas aletas e na fuselagem traseira como um todo a velocidades superiores a 600 km/h, e quando o trem de pouso estiver levantado, um mecanismo de mola é conectado ao sistema de controle direcional que fornece a parada de travamento no meio dos pedais de cada lado. É proibido ultrapassar a parada de bloqueio dos pedais nas velocidades de até 600 km/h. É por isso que o deslocamento do pedal nessas velocidades é reduzido pela metade nesta simulação.
A propulsão do Su-27 inclui duas turbinas АЛ-31Ф (AL-31F), cada uma com sua própria ignição de partida da turbina ГТДЭ-117 (GTDE-117). Como ambas as turbinas têm um acionador de partida separado, é possível dar partida individual e simultânea de ambas as turbinas.
Ignição da Turbina no Solo
Para iniciar as turbinas no solo, deve-se:
Ligue a energia elétrica
Coloque o acelerador da turbina em IDLE
Pressione as teclas para dar a ignição na turbina esquerda e direita
Depois disso, as portas da ignição da turbina se abrirão, a chave limitadora da porta atuará e colocará o circuito ignição em operação. Baseado no comando do circuito da ignição, o combustível é fornecido para o arranque da turbina e o anunciador "ЗАПУСК" (START) é aceso na cabine.
O circuito de ignição liga o motor de partida elétrico, acende a ignição da turbina e fornece oxigênio para partida da turbina. Após dez segundos, a partida da turbina desligará esses acessórios e simultaneamente ligará a ignição da câmara principal. A partida da turbina gira o rotor da turbina e a unidade de controle de combustível controla o fluxo de combustível para a câmara principal. Após a ignição na câmara principal, a turbina entra em operação e acelera o rotor da turbina junto com a partida da turbina. A 35% da rotação do motor, o excitador de ignição na câmara principal é desligado. A 53% da rotação do motor, ou após 50 segundos, o arranque da turbina e o circuito de partida são desligados, o que é indicado pelo anunciador "ЗАПУСК" (START) desligado. O motor então atinge o modo IDLE automaticamente.
Sistema de Controle dos Bocais
O sistema de controle dos bocais destina-se a alterar o diâmetro do bocal de exaustão de acordo com a regra desejada.
Antes do arranque do motor, durante a ignição e quando no modo IDLE, os bocais estão completamente abertos para fornecer as condições mais favoráveis para o arranque do motor: o maior torque da turbina, o sobreaquecimento mínimo e o empuxo mínimo é durante o modo IDLE. Quando o acelerador é movido para a frente a 77-81% da rotação do motor, os bocais fecham parcialmente para produzir características de empuxo aprimoradas. Quando o pós-combustor é ligado, os bocais se abrem para manter a temperatura de exaustão da turbina. À medida que a relação do aumento de impulso aumenta, os bocais abrem.
Quando o trem de pouso é estendido, os bocais são parcialmente fechados para preservar a margem de potência e evitar contato do bocal com a pista durante o aterrizagem. Devido a isso, o impulso é aumentado quando no caminho de planeio. Para desacelerar, o freio aerodinâmico deve ser usado.









Comentários
Postar um comentário